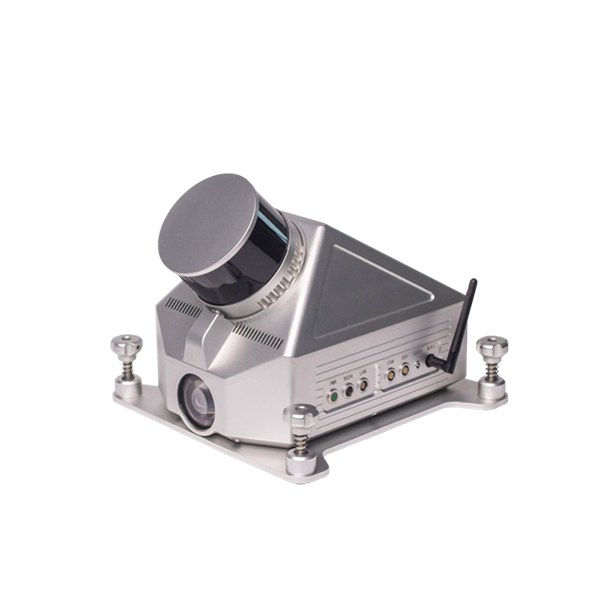
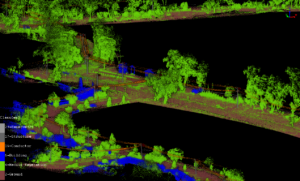
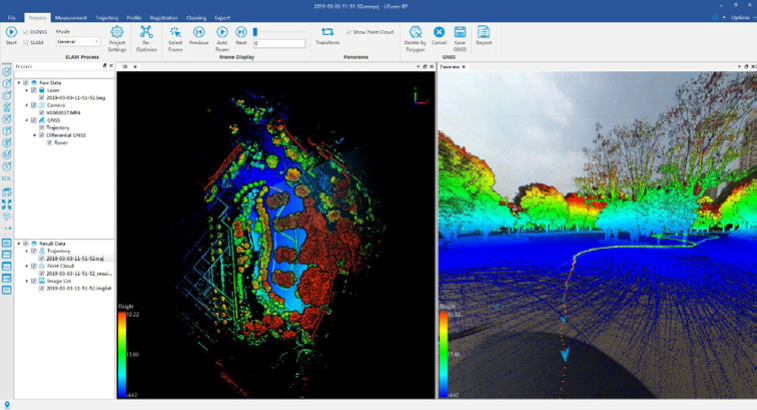
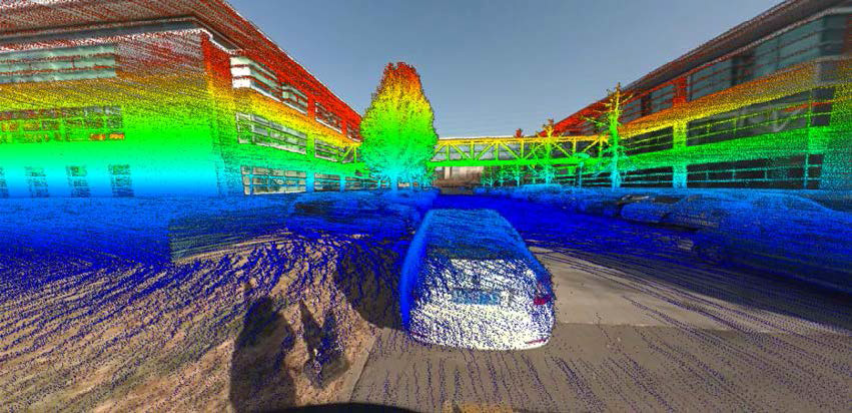
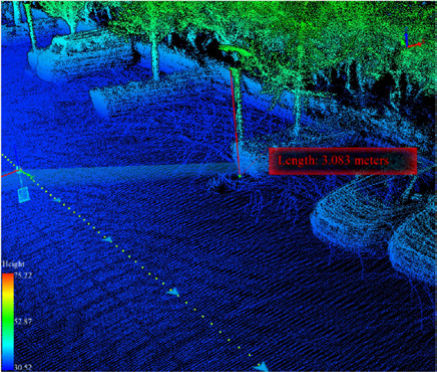
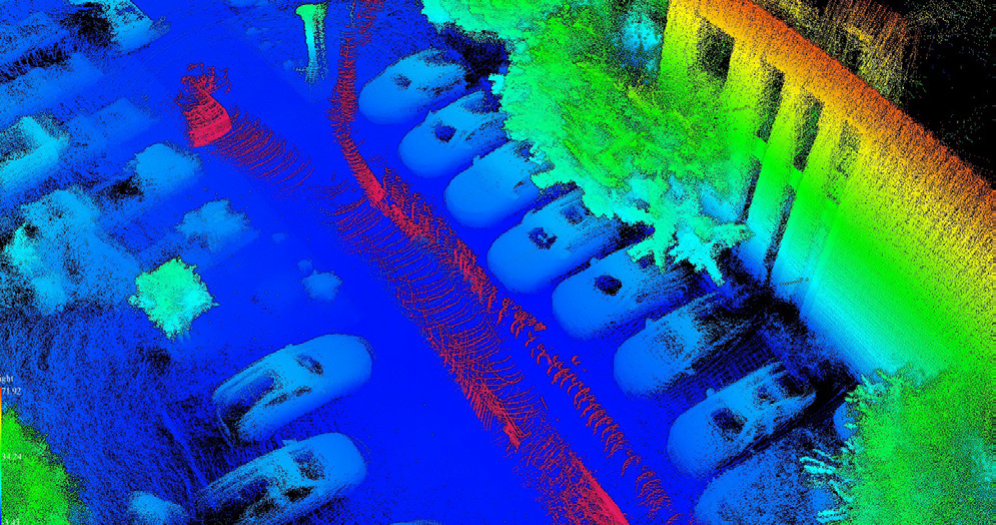
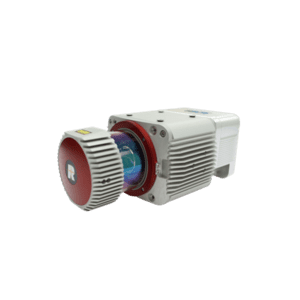
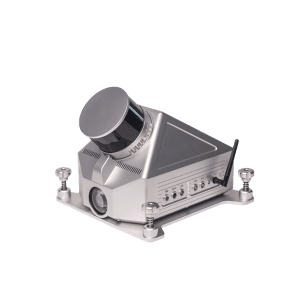
With the help of GPS positioning information, combined with lidar and Simultaneous Localization And Mapping (SLAM) technology, the LiBackpack DGC50 backpack lidar scanning system can obtain laser point clouds and panoramic image data with high-precision geographic coordinate information, even in In GPS denied areas.
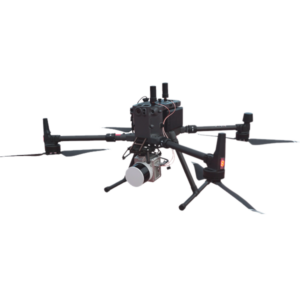
In addition to the BIM field, the equipment has also been widely used in indoor and outdoor integrated measurement, underground space information acquisition, tunnel engineering, digital factories, digital mines, and forestry resource censuses.
Learn more about its applications in BIM applications.